Fields of competence

ROBOTNOR represents a unique synergy of academic and industrial expertise which allows us to counsel and comprehend a wide variety of tasks and projects. Our fields of competence are numerous and diverse.
ROBOTNOR represents a unique synergy of academic and industrial expertise which allows us to counsel and comprehend a wide variety of tasks and projects. Our fields of competence are numerous and diverse.
To understand, simulate and design controllers for complex mechanical systems, it is necessary to have […]
It is not always possible to control inherently nonlinear systems by linear control methods throughout […]

Bestowing our machines with intelligence has been an ambitious goal for scientists since the birth […]

Mainly aiming at automatic control systems within manufacturing and production, the integration of planning, scheduling, […]

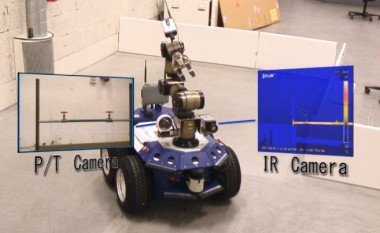
Often one sensor or one measurement principle can not capture all the information needed to […]
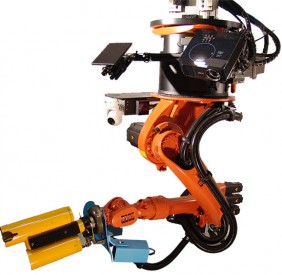
Machine vision is an essential part of most robotic system and is generally described as […]

Motion planning is a central topic in most of our research activities. In particular, motion […]

The ability to describe the motion of an object, i.e. the change of position and […]

These webpages have just been launched and will be continuously updated during the coming weeks. […]

These webpages have just been launched and will be continuously updated during the coming weeks. […]
Collision detection and avoidance are crucial components in any moving system that needs to interact […]
When working with robotic systems, mechatronics is an important tool in your toolbox. If you […]

Guidance and navigation is an essential part of the on-board systems of any device capable […]

These webpages have just been launched and will be continuously updated during the coming weeks. […]
In order for robots to navigate and interact more like humans in complex environments, manipulating […]

Grasping is an essential part of most modern production systems. ROBOTNOR is developing new grasping solutions aimed towards increased flexibility in production lines of tomorrow and significant savings in production costs.
These webpages have just been launched and will be continuously updated during the coming weeks. […]

Our fascination for robotics span a wide range of robotic mechanisms, and our research on these systems targets both theoretical and practical topics.

Industrial robots are the relentless workforce of the industries. They pick, place, paint, and weld […]
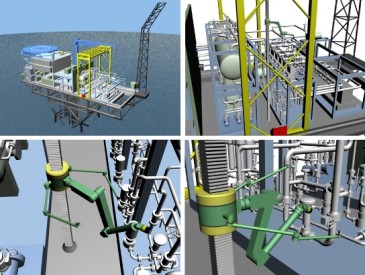
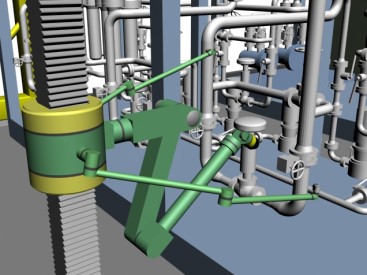
SINTEF ICT has cooperated with the Norwegian oil & gas company Statoil since 2005 on […]

In a few years, snake robots will assist in search and rescue missions after earthquakes and carry out maintenance operations inside process pipes. ROBOTNOR has conducted research on snake robots for several years and is getting closer to realizing the potential of these mechanisms.

Liquid water covers 71% of the Earth’s surface, and waterways have been the lifeline of […]

European countries have vast coasts and economic zones which go far into the Atlantic and […]
This page will be updated soon.

Biped locomotion is a highly efficient method of locomotion, which allows robots to move over […]

Wheeled robots are excellent tools for simple tasks such as moving objects from one place […]
Nanorobotics is an emerging and wide-spanning field. It can either be defined as a system […]
Vision sensors are necessary for the robots to understand and interact with their surroundings. Depending […]

The loss of a limb is a great limitation on the freedom of a person. […]
These webpages have just been launched and will be continuously updated during the coming weeks. […]

Experimental investigations are an important part of our research activities. Our lab infrastructure is the backbone of these investigations.
In cooperation with Statoil, ROBOTNOR has developed a robotics lab devoted to remote controlled oil […]
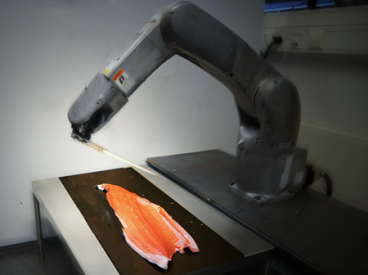
The industrial robotics lab is an arena where the challenges of robot manipulation are tackled. […]

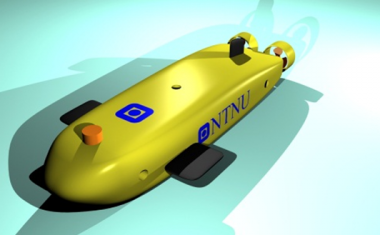
NTNU has recently established the Applied Underwater Robotics Laboratory (AUR lab). The lab is being used for applied research on subsea robotics.
The snake robot laboratory at ROBOTNOR got a significant upgrade in 2013. The lab now […]

The robot learning laboratory is not confined to any specific robot system, but acts as […]

A lab facility for research on nanopositioning has been established at the Department of Engineering […]
More information about our Dual Manipulation Lab will be added soon!

The Norwegian and European sewing industry has to a large extent been outsourced to low […]

The unmanned aerial vehicles laboratory is a test facility for NTNU’s Research on unmanned aerial […]
Reliable and efficient production holds the key to a brighter future. Robotics is delving deeper and flying higher for our future.
Stronger than the human body, more robust and no wear and tear. Robots present a potential boost in efficiency and quality.

Precision, productivity and perfection. Advanced algorithms and groundbreaking design paves the way for the modern manufacturing robots.
Challenging conventional form and function, robotics is innovation incarnate in the marine industries.
Discover smart and efficient production methods in the world of robotics.

Robotics is able to lend a helping hand to those in need. Robots are becoming more precise, more reliable and able to interact with humans in a natural environment.
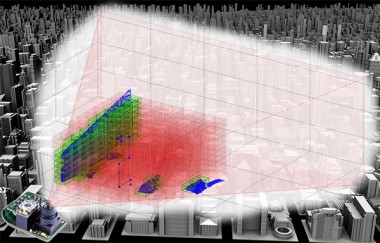
Machine vision is an essential part of most robotic system and is generally described as using complex models based on physics, geometry and statistics to reduce high-dimensional sensory information, e.g. images and video, into a symbolic representation of the world. From the symbolic representation, which includes information such as the type, shape and pose of objects, intelligent methods can be developed to help the robot understand and/or interact with its surroundings.
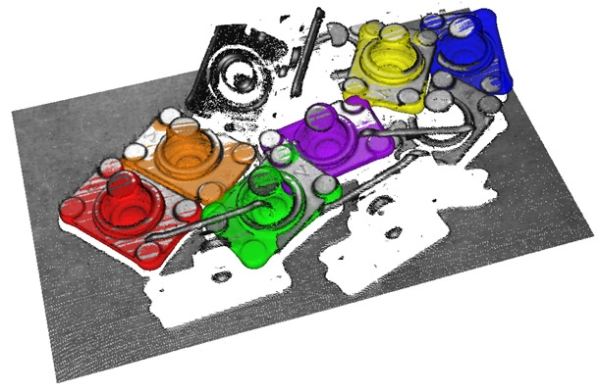
ROBOTNOR researchers have played a major role in developing machine vision technology for both industrial and academic partners and consequently possess a wealth of expertise in the design and implementation of systems including areas such as object detection, pattern recognition and shape analysis. In the last years the advent of new 3D sensors have also opened up entirely new areas for automation in bin picking, automated sorting, quality inspection and control.
Our researchers are also developing entirely new optical sensor technologies and improved 3D cameras, pushing the boundaries for automation into even more areas where robotics was previously unfeasible. See our research pages for more on this.
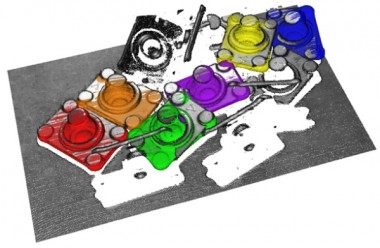
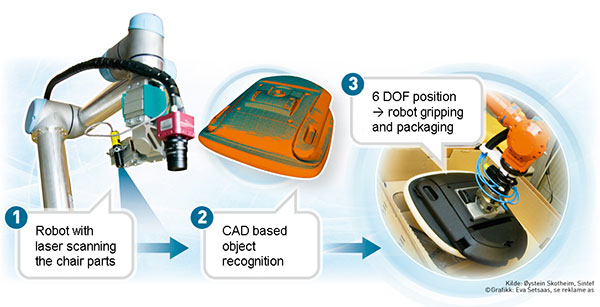 |
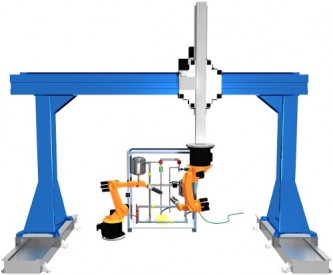
| Packaging of chair seats for HÅG in the NextGenRob project. First a 3D detection of chair parts is performed based on 3D laser data. Based on the pose of the detected parts, a robot was used to grasp and package the seats in cardboard boxes. |
In order for robots to navigate and interact more like humans in complex environments, manipulating […]

Often one sensor or one measurement principle can not capture all the information needed to […]

Collision detection and avoidance are crucial components in any moving system that needs to interact […]

Bestowing our machines with intelligence has been an ambitious goal for scientists since the birth […]

Vision sensors are necessary for the robots to understand and interact with their surroundings. Depending […]

Mobile robot manipulators (mobile robots with one or more attached manipulator arms) will be prevalent […]

Launched in 2009, this project aims to develop the next generation robotic technology for Norwegian […]

The TACO (Three-dimensional Adaptive Camera with Object Detection and Foveation) EU project aims at enhancing […]

Herbicide spraying is necessary to optimize crop production in cereal fields. Full field spraying is […]
